December 2019
Intermediate to advanced
456 pages
11h 33m
English
There are multiple DDS implementations supported in ROS-2 since different vendors offer different features. For instance, RTI's Connext may be specifically implemented either for microcontrollers or toward applications requiring safety certifications. In all cases, DDS is implemented through a special layer called the ROS middleware interface layer (or rmw), as shown here:
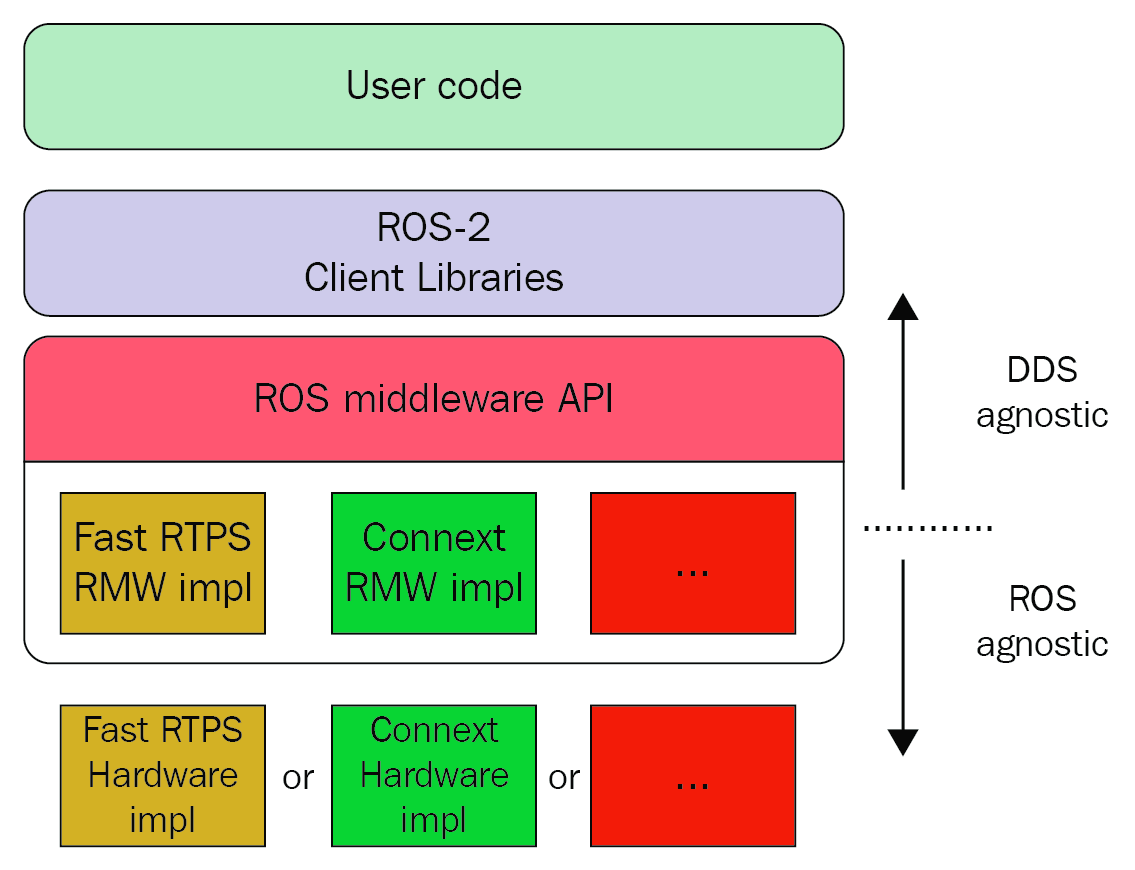
The user code is the topmost block and contains the user logic or the algorithm. In ROS-1, the user code usually sits on top of the ROS client library (such as roscpp or rospy) and these libraries help the user connect their ...
Read now
Unlock full access






