2.12. Transformations 31
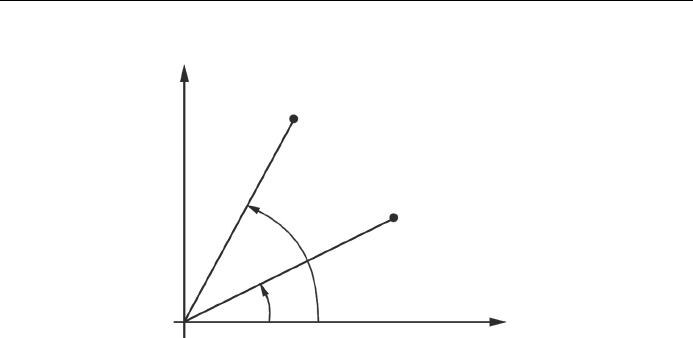
Figure 2.12: Rotation of point P by a n angle θ round the z axis.
Rotation about the x axis To rotate round th e x axis by an angle θ, the transfor-
mation matrix is:
[T
x
(θ)] =
1 0 0 0
0 cosθ −sinθ 0
0 sinθ cosθ 0
0 0 0 1
Note that as illustrated in figure 2.11 θ is pos itive if the rotation takes place
in a clockwise sense when looking from the or igin along the axis of rotation. This
is consistent with a right-handed coordinate system.
2.12.4 Combining transformations
Section 2.12 introduced the key concept of a transformation applied to a pos ition
vector. In many cases we are interested in what happens when ...






