212 6. Computer animation
0
1
1
0
2
3
2
3
v
2
v
1
v´
2
u
3
˝
u
1
v
3
˝
v
1
v
3
u
2
u
1
u
3
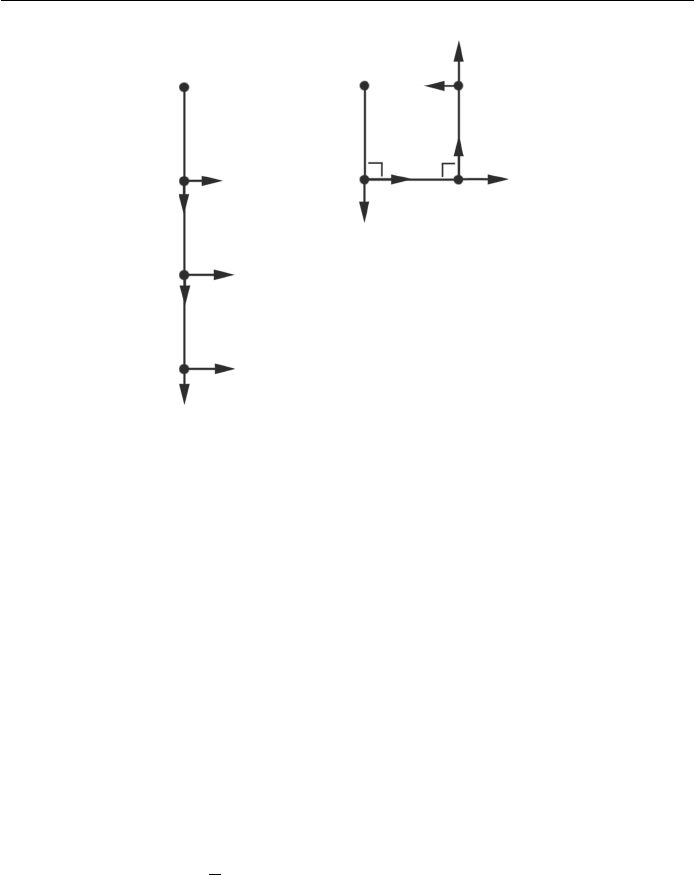
Figure 6.17: A simple s keleton in two poses with local frames of reference given by
vectors u, v and w. All the w vecto r s are at right angles to both u and v and therefore
they point into the page and thus are not visible in the diagram.
section to develop a strategy for hierarchical interpolation which minimizes the
complexity.
The main difficulty with a moving frame of referen ce can be illustrated by
looking back to the example in figure 6.14, which is rep r oduced in figure 6.17
with additional vectors depicting the local frames of reference at the nodes on
the end of the bones.
Consider






