6.3. Character a n ima tio n 207
P
0
P
2
P
1
x
1
y
1
y
2
z
2
z
1
z
3
´
y
3
´
x
3
´
x
4
´
y
4
´
z
4
´
P
3
´
P
4
´
x
2
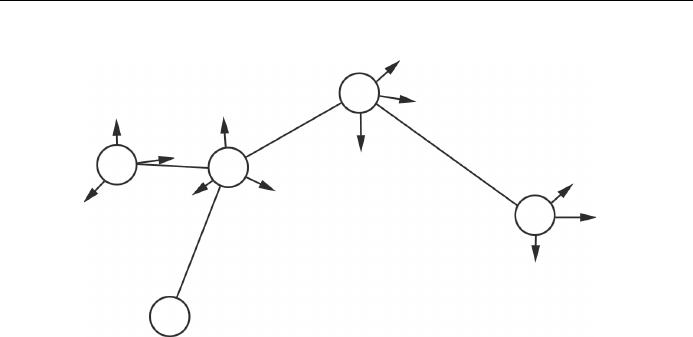
Figure 6.12: Sp ec ifyin g a pose for the skeleton in figure 6.11 by a rotation of bone 3
and its descend a nts round the no d e at the end of bone 1.
performed at a point. This matrix takes the form:
[M] =
a
00
a
01
a
02
0
a
10
a
11
a
12
0
a
20
a
21
a
22
0
0 0 0 1
(6.2)
The last row and column contain zeros because there are no translation compo-
nents when manipulating a skeleton, and all rotations are relative to a coordinate
system with its origin at the point around which the skeleton is pivoted.
Once [M] has been calculated, its application to P
3
and P
4
will move them
to appropriate locations ...






