232 6. Computer animation
A single link in the
chain built in a global
frame of reference
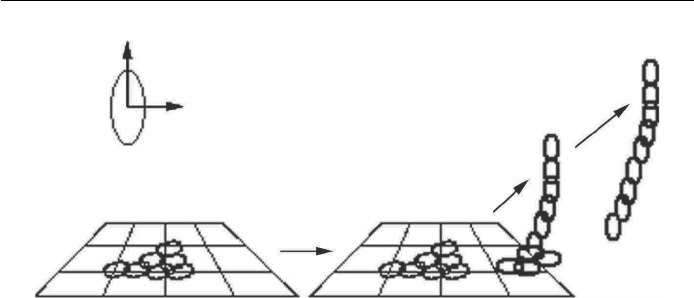
Figure 6.25: IK is used to animate the raising of a chain from a pile of links on the
floor until it dangles from a hook.
To build the multi-link chain the in d iv id u al model is copied and then rotated
and/or translated as necessary to assemble the chain.
What we will show in this section is that it is possible to obtain all the
necessary terms for the calculation of the Jacobian in equations 6.19 or 6.25
from the same ser ies of transformation matrices used to position copies of a
model in some hierarchical combination such as the chain example.
To see how this ...






