6.5. Physics 237
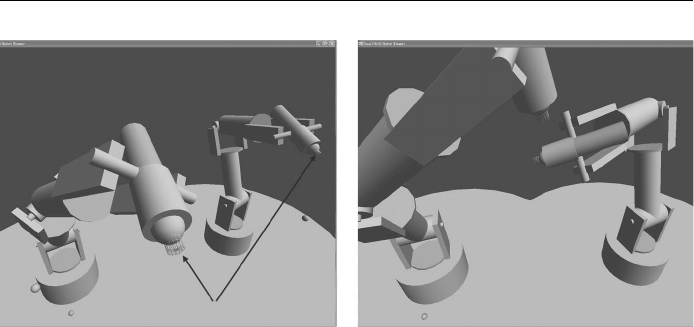
Figure 6.30: An inverse kinematic simulation of two id ea liz ed 5 degree of freedom
robots performed using the cyclic coordinate descent algor ith m.
orientation are set interactively by the user; the articulated linkage then follows
these points. The angular orientation of each of the joints is determined by
the algorithm. A screenshot of the program is illustrated in figure 6.30. The
visualization was created using a combination of the basic pr imitive cylinders
and cubes rendered using OpenGL and the GLUT an d adapted from the basic
template program presented in section 7.1.5.
6.5 Physics
When comp u ter game pr ogr ...






