6.4. Inverse kinematics 227
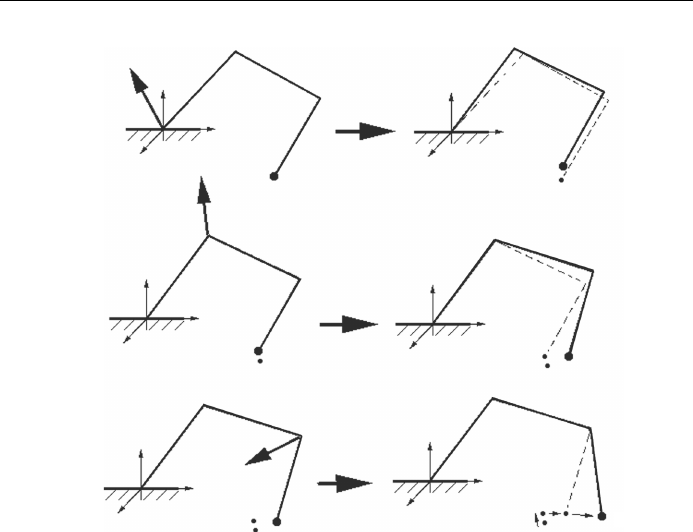
Arrows and dots show how
the end point moves as each
rotation is applied.
P
1
P
1
P
4
n
2
n
1
P
1
(c)
(b)
(a)
P
1
P
1
P
1
n
3
P
4
˝
Figure 6.24: Accumulating the small rotations occurring at each link of a three-link
articulation leads to an accumulated change in the position of the end point of the
linkage P
4
. In (a) the linkage is slightly repositioned by a small rotation round
ˆ
n
1
. For
(b) and (c) the small rotations only apply to links lying between the point of rotation
and the end of the articulation at P
4
.
In section 2.12.3 matrices were given which would r otate a vector by a spec-
ified angle around either the x, y or z coordinate axis. If






