Controller Redundancy Design for Cyber-Physical Systems 81
0 10
(a)
(b)
20 30 40 50 60
−20
−10
0
10
20
Time (s)
Angle (°)
θ
1
θ
2
0 10 20 30 40 50 60
−30
−20
−10
0
10
Time (s)
Angle rate (°/s)
d(θ
1
)
d(θ
2
)
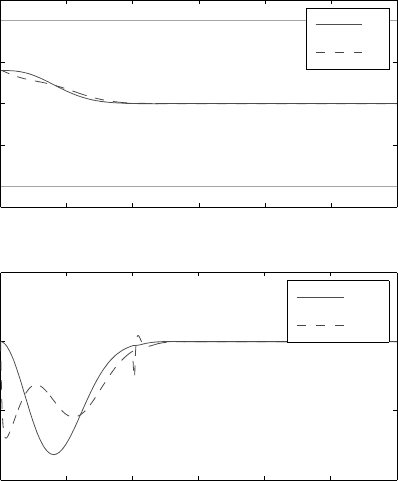
FIGURE 3.13 HAC control for a satellite system: (a) angle responses; and (b) angular rate responses.
0
10
20
30
40
50
60
−20
−10
0
10
20
30
Time (s)
Angle (°)
θ
1
θ
2
0 10 20 30 40 50 60
−50
0
50
100
Time (s)
Angle rate (°/s)
d(θ
1
)
d(θ
2
)
(a)
(b)
FIGURE 3.14 HPC control for a satellite system: (a) angle responses; and (b) angular rate responses.