196 Cyber-Physical Systems: From Theory to Practice
Hx
ML
optimal estimator
y
noisy observation
(a) (b)
C
ML
estimation error
Q
w
observation
noise
Hx
real field
Hx
c
consensus-based
estimator
y
noisy observation
C
C
consensus-based
estimation error
Q
w
observation
noise
Hx
real field
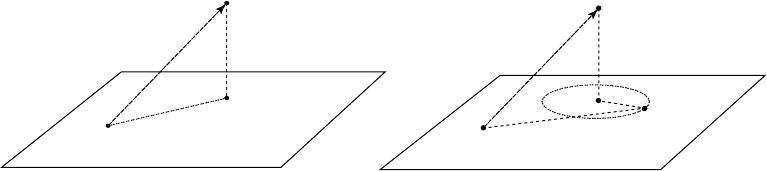
FIGURE 8.4 Geometrical interpretation of the parameter estimation when the observation matrix is orthonor-
mal, for M = 2. (a) the optimal estimation is the orthogonal projection of the observations onto the subspace;
(b) the projection is computed in a distributed way by means of iterative average consensus, yielding a suboptimal
estimator.
This estimation process can be explained in a geometrical ...






