After creating the robot model, we can test it using the test_irb2400.launch file. The following command will launch the test interface of the ABB IRB 2400 robot:
$ roslaunch abb_irb2400_support test_irb2400.launch
It will show the robot model in RViz with a joint state publisher node, as shown in the following screenshot:
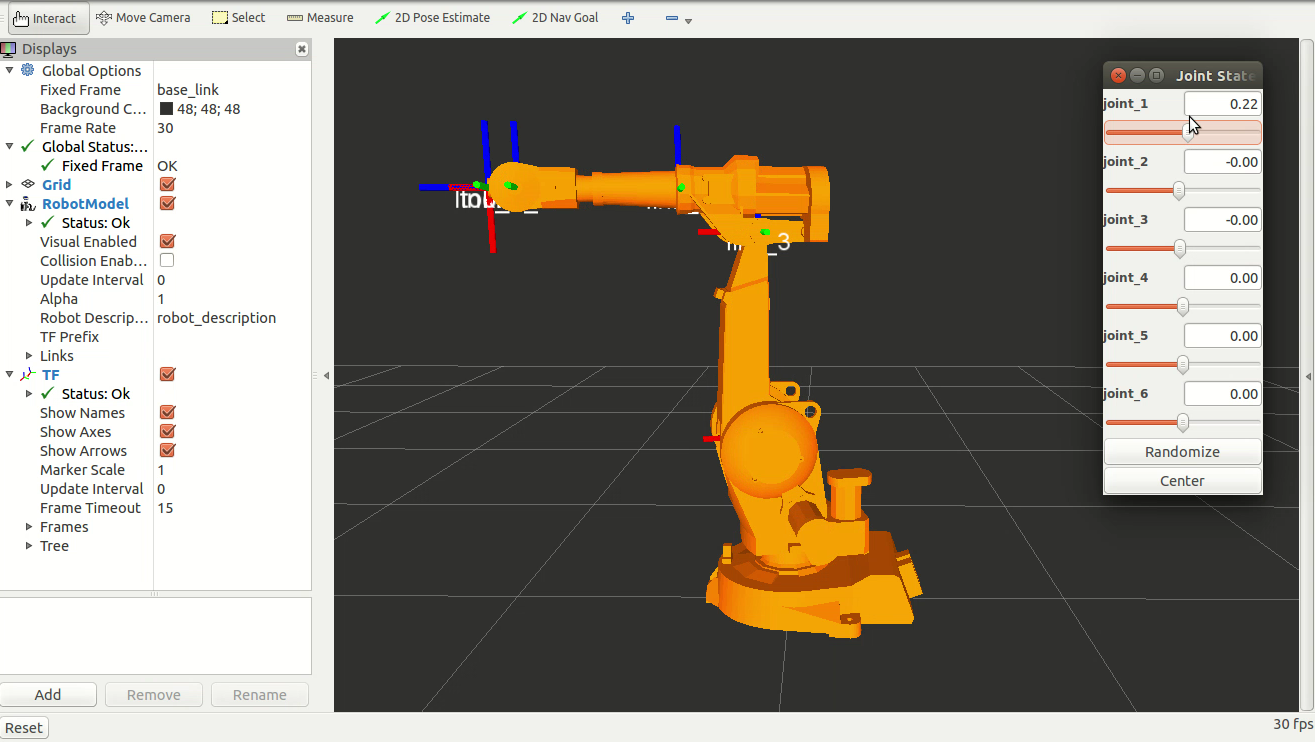
Figure 13: ABB IRB 2400 with joint state publisher on RViz
We can adjust the robot joints by adjusting the joint state publisher slider values. Using this testing interface, we can confirm whether the URDF design is correct or not.

