100 Make: Robotic Arms
WHAT ARE WE BUILDING?
In chapter 3, we saw that with a little bit of math, we can develop a series of
inverse-kinematics equations that allow us to gain a much greater amount
of control for our robotic arm. Thankfully, the calculations for our four-link
robot will be similar. We’re going to apply a lot of the same concepts in a few
new ways, which will allow us to teach our robotic arm some exciting new
tricks, like drawing shapes.
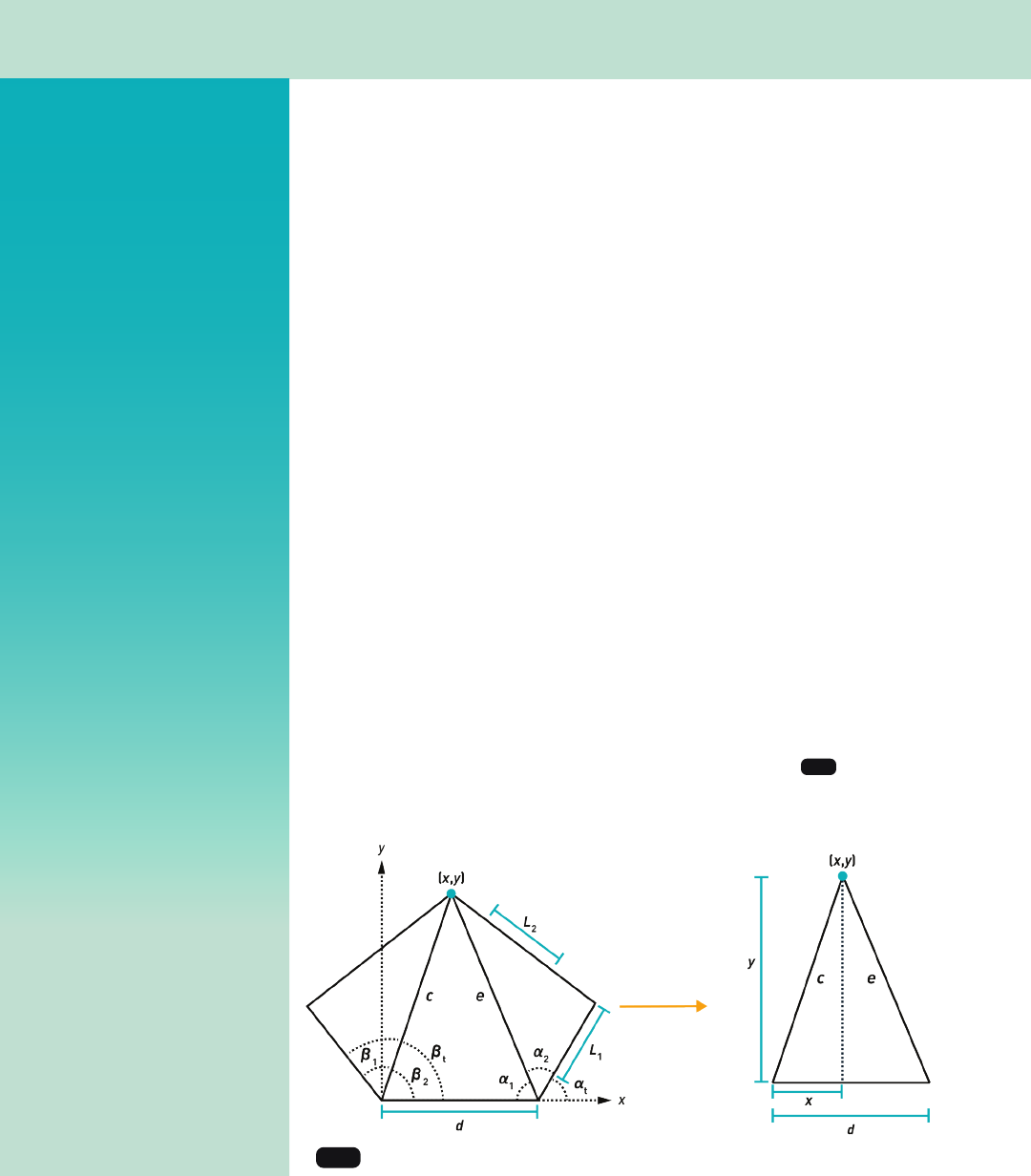
STEP 1: CALCULATING C AND E
Our first step in finding the inverse kinematics will be to discover the value of
our two theoretical line variables, c and e. Thankfully, this is a snap. All we’ll ...






