166 Make: Robotic Arms
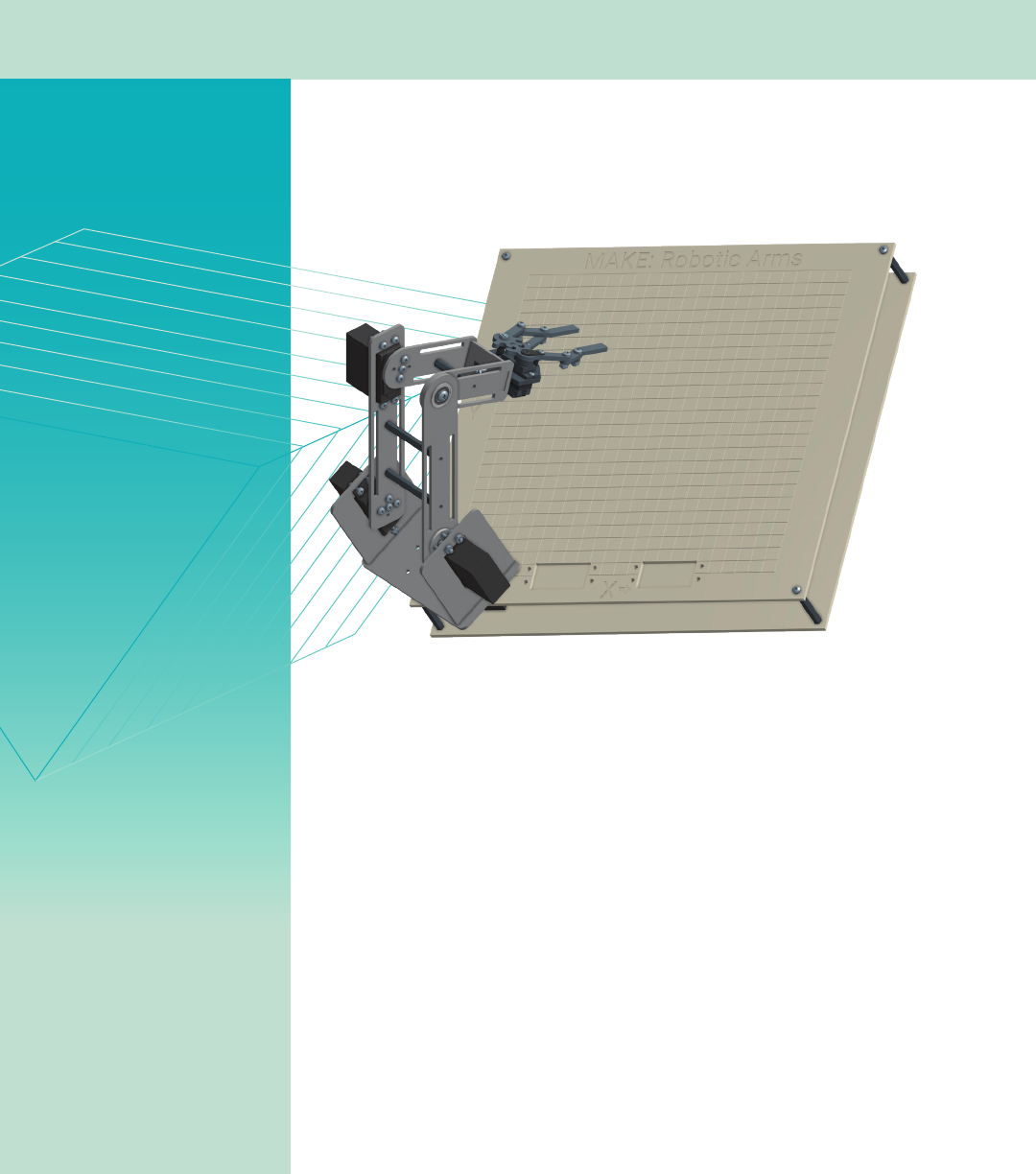
Let’s take another look at our newest robotic-arm design. Here, we
have oriented the actuators of the arm so the end effector is near the
center of the grid, much like we have done in previous chapters with
our other robotic-arm designs. Roughly speaking, our base servo,
responsible for rotating the entire arm, is set to 45 degrees. Next, we
have the two servos that make up our second major joint, which is also
set to roughly 45 degrees. Lastly, we have our third joint, controlled
by our fourth servo, which is set to an angle of 90 degrees.
If our goal is to develop a set of calculations that can determine the
inverse kinematic ...






