June 2018
Intermediate to advanced
484 pages
11h 36m
English
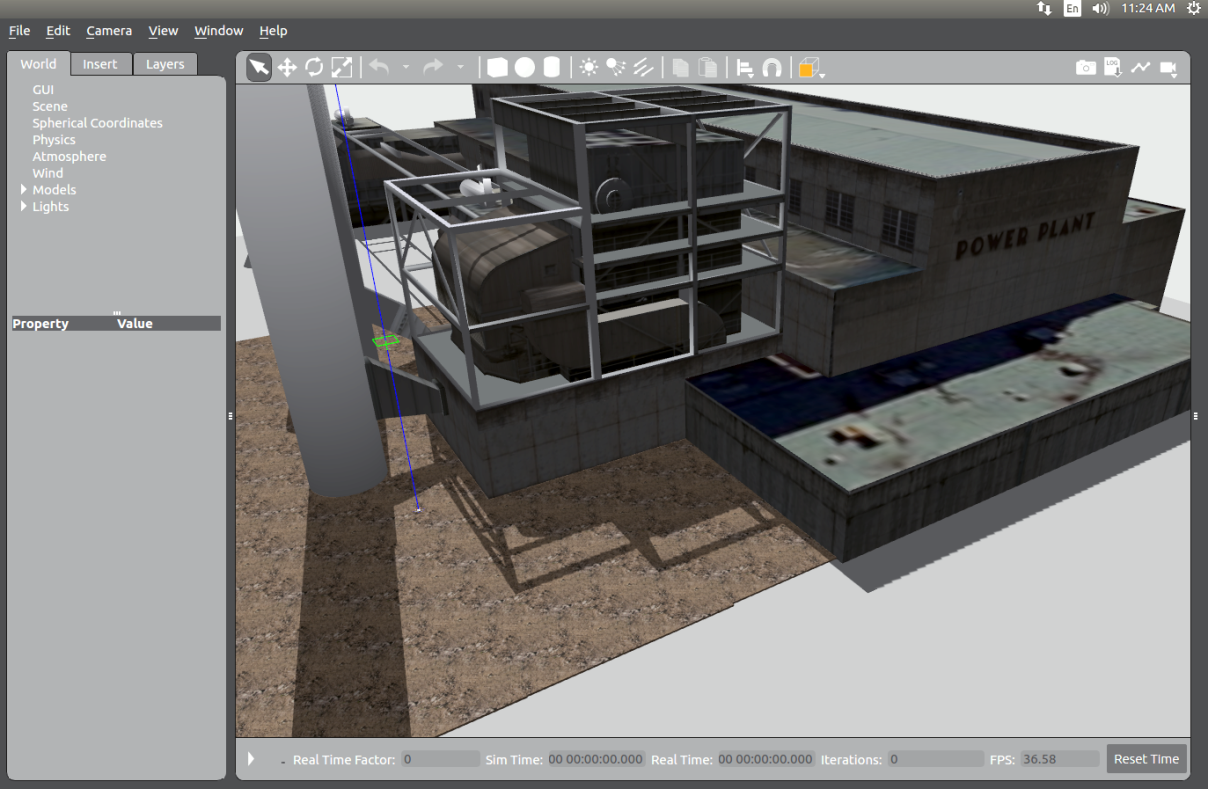
In the RotorS simulator, we can prepare a demo environment with a power plant and a waypoint publisher to experiment with different planning algorithms. A file with the Octree representation of a demo environment including the power plant can be found in the rotors_gazebo/resources folder and can be used with the octomap_server package. The Octree representation allows for efficient collision checking in the planner and is applicable for 3D environments.
The following command will execute our experimental setup:
$ roslaunch rotors_gazebo mav_powerplant_with_waypoint_publisher.launch
Following is the output: