June 2018
Intermediate to advanced
484 pages
11h 36m
English
<launch> <node pkg=""chapter4_tutorials"" type=""program1"" name=""program1"" output=""screen"" launch-prefix=""xterm -e gdb --args""/> </launch>
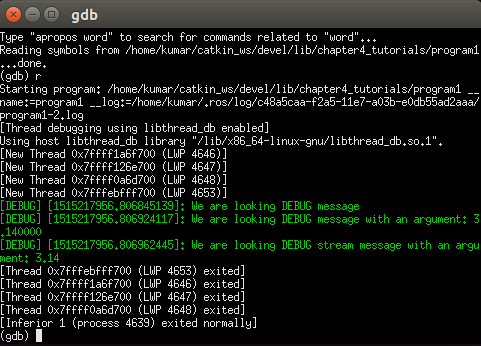
$ roslaunch chapter4_tutorials program1_gdb.launch
Moreover, we can set breakpoints if needed and then press the c or r key to run the node and debug it. The source code can be listed by using the l command: